图网络模型(一)
谈谈那些图网络模型 - Monet、EGCN、GraphSage
几何模型 (geometric models) 研究已经在图像处理、流形学习、信号处理等领域得到了广泛的关注。最近几年也有不少的基于 非欧几里德结构数据 深度学习研究。本文主要对 Monet、EGCN、GraphSage 等模型进行总结。
Monet
Mixture model networks (MoNet) 出自 Geometric deep learning on graphs and manifolds using mixture model cnns [1] 一文。他的主要思想是:可学习的核函数。
该论文对先前的几何模型做了总结,如下表。可以看出,大部分几何权重函数都是固定的。
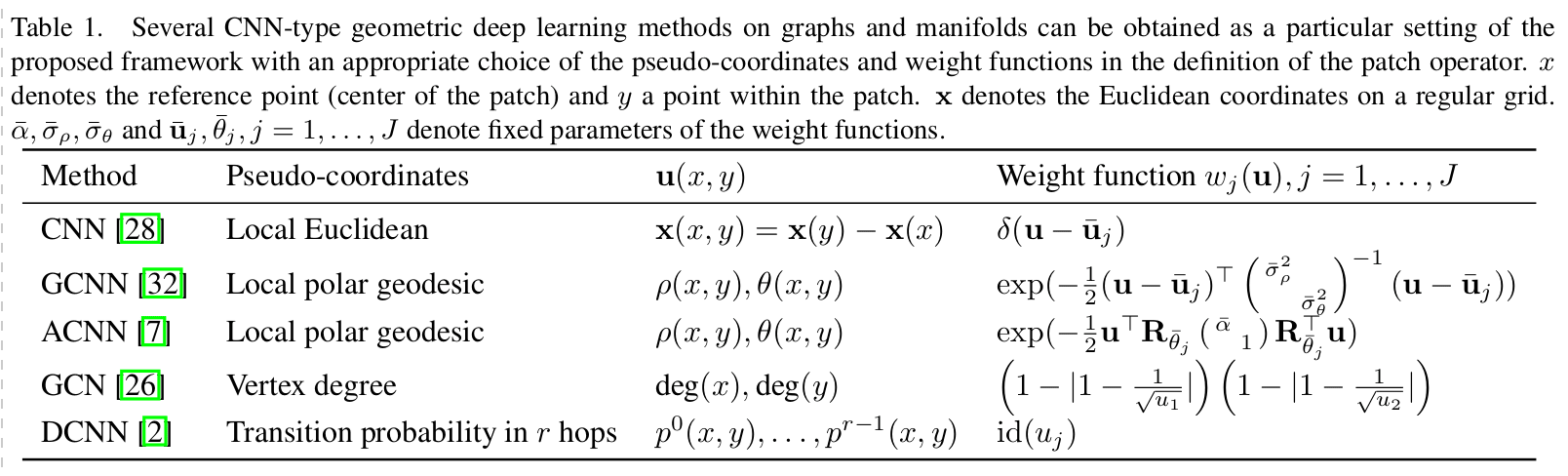
针对上述情况,Monet 作者认为可以从节点之间的边权重入手,来优化模型。于是提出了以下层与层之间的传播方式:
其中,为原节点特征, 为一个包含可学习参数的核函数 kernel。
实验与结果
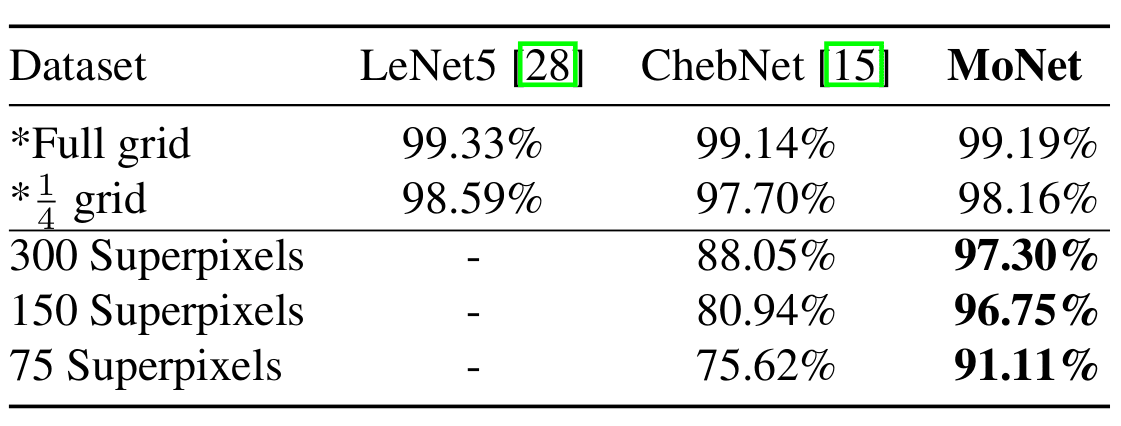
论文作者使用了以下核函数对 MNIST 数据集进行了测试。
结果发现,尽管对于正规网格像素组成的图片,准确率并没有多大提升。但对于超像素构成的图片,MoNet 仍然可以保留很高的准确率。
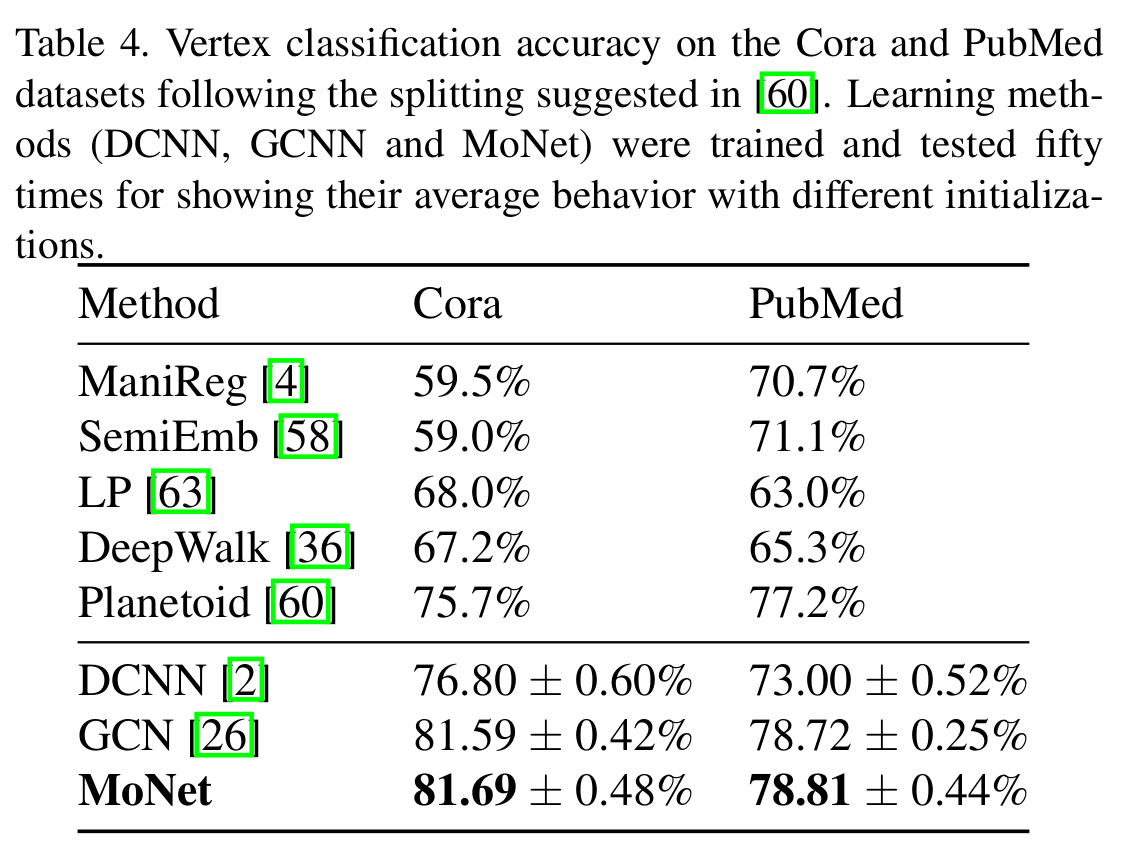
而后作者在 Cora 和 Pubmed 两个数据集上进行了图结构数据的测试。
图模型上的传递方式为:
通过对比 GCN 与 DCNN,不难看出可学习的核函数带来了一点点的提升。
为啥 MoNet 没 GAT 出名
GAT 与 MoNet 十分相似,也可以说 GAT 是 MoNet 的一个特殊例子,然而两篇论文的被引用数量却差了快 8 倍。
读完 MoNet 的文章,第一感觉是这文章讨论的很全面,不仅在数学方面上对历年的模型做了很好的总结与分析,对于几个不同的研究方向(图片识别,图数据网络,流形学习)也都进行了充分的实验。尽管 GMM 核函数的实验结果好,但在可解释性上似乎还差那么一点。GAT 则着重推广了相对简单的,可解释性相对高一点的方案。另一方面 MoNet 团队的名气确实也不如 Benjio,作为创新者的名气没有后来者高确实可惜。
EGNN
EGNN 出自 Exploiting Edge Features in Graph Neural Networks 一文。其主要思想与特点为:
- 采用多维的正边特征(GAT 只能处理 binary 的边特征,GCN 智能处理一维的边特征)
- 使用新的架构来在层与层之间传递边信息。
- 采用双正则优化,提高训练效果与稳定性。
- 使用多通道编码单向图边信息。
对于以下的解释,我们先定义:
- 表示 第 i 个节点的第 j 个特征
- 表示 i,j 两个节点间 edge 的特征。如果两个节点间没有边的话,则 。
- 为节点 i 的邻居节点。
双正则优化
边特征作为输入前,将会被进行双正则化。操作如下: 代表原始边特征。
经过双正则化之后的边为非负值,且不论从 i,或者 j 节点求和,值都为 1。
EGNN(A)
基于注意力机制的 EGNN 架构
论文提到 GAT 只考虑到了一维的 0/1 遍特征(有边的节点之间存在注意力,没有边的节点不存在注意力。),因此 GAT 的注意力机制由两个节点决定,并没有考虑到边的特征,如边的权重。
EGNN 提出了新的节点前向传导方式:
其中,
注意力系数 在 p 通道的切片表示为 ,两个节点之间的注意力系数由 决定。
对于多维度的边特征(),每个维度都会引导一个独立的注意力操作,最终的结果由所有维度下计算结果 拼接 得到。
每一个边特征维度的注意力计算方式如下:
其中 为 leakyRelu, 与(8) 中的映射矩阵相同。计算求得的注意力权重也会被设置为新的边特征:
EGNN(C)
基于卷积的 EGNN 架构。EGNN(C)网络层的传播方式定义为:
对于有向图,EGNN 将将边信息编码成了:
即:前向,反向,无向三种邻居的边信息。
实验结果
从论文结果看出,EGNN(C) 在 Cora, CiteSeer,Pubmed 三个数据记上均优于 GAT 与 GCN。而 EGNN(A) 的评测指标略低于 EGNN(C)。
GraghSage
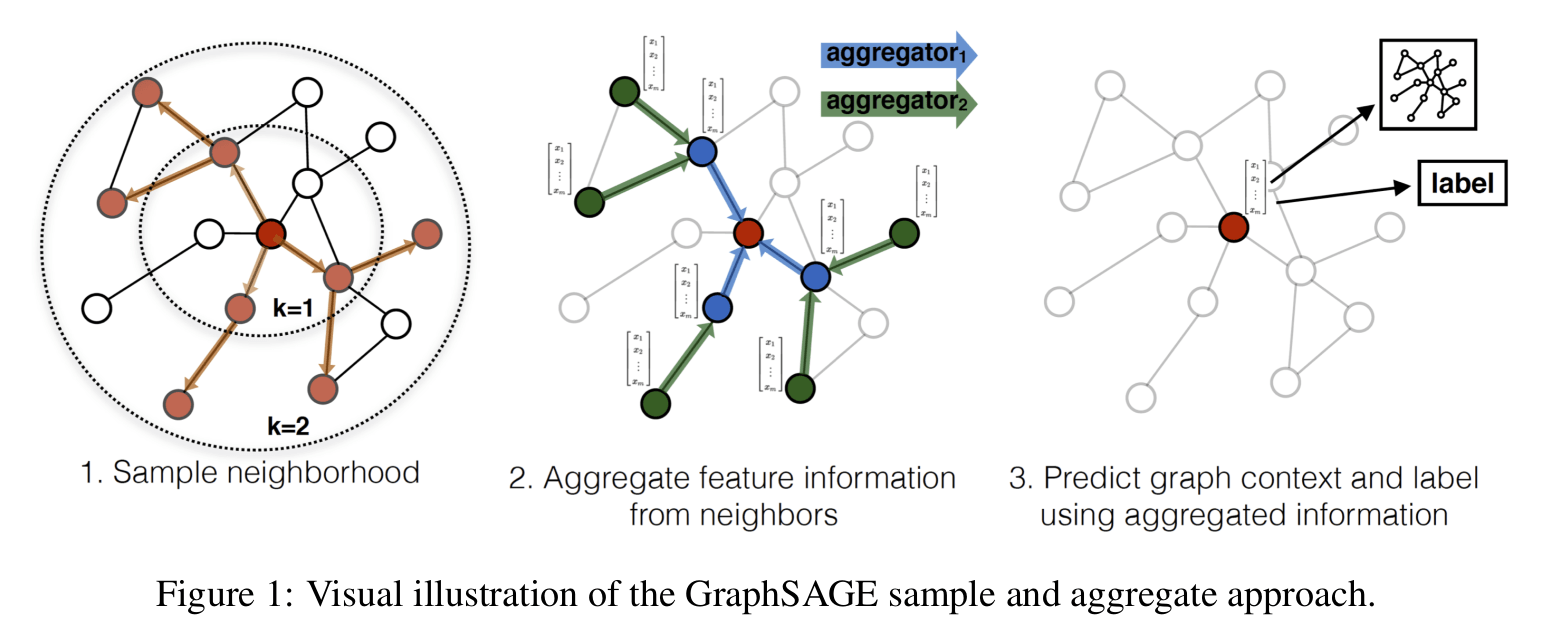
GraphSAGE(SAmple and aggreGatE) 出自 Inductive Representation Learning on Large Graphs 一文。不同与 GCN,GraphSage 为 inductive 算法,对于新增节点的计算比较友善。同时算法时间复杂度较低,效果也不错,是现在工业界较为流行的一个算法之一。
官方提供的代码链接:tensorflow , pytorch
主要算法
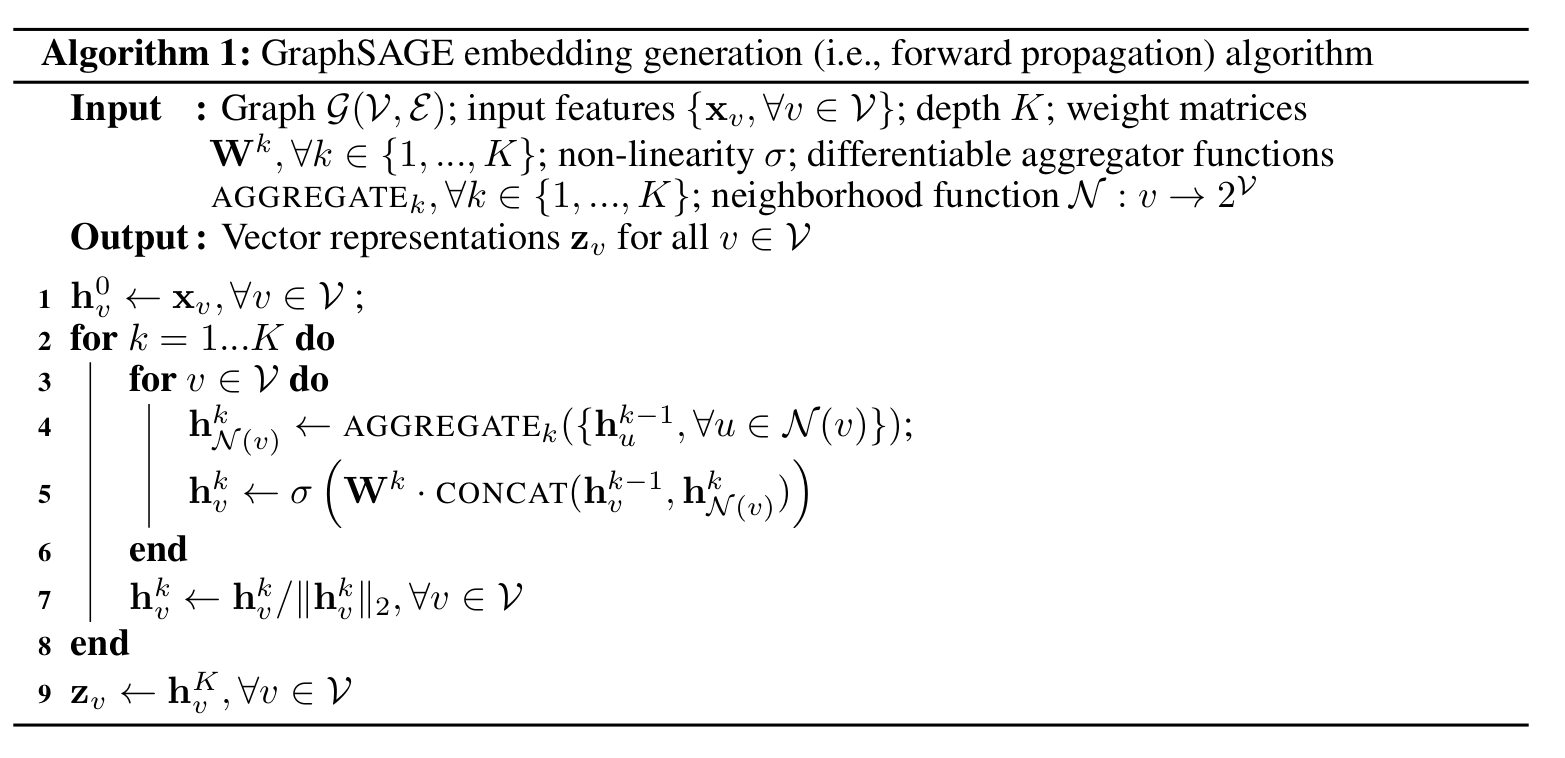
他的主要算法如下:
minibatch 的算法
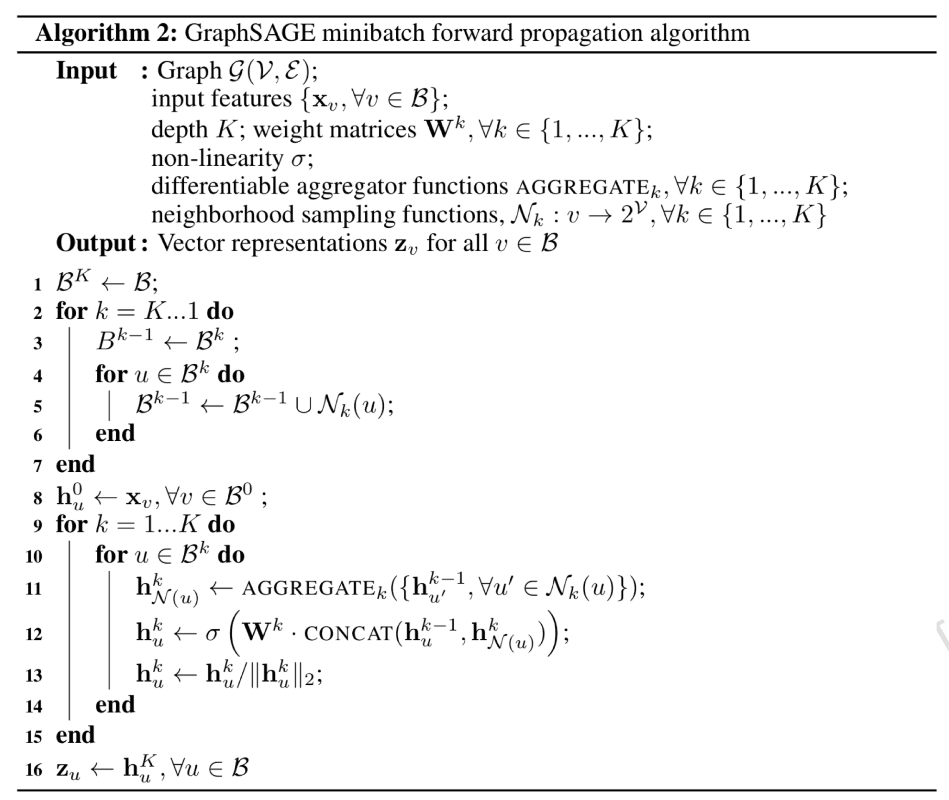
采样与邻居的定义
对于采样深度 ,与采样个数 ,论文作者实验发现 , 的效果很好。
采样深度 表示,采样时最多对二阶邻居进行采样。当第一层邻居的采样结束后再对第二层邻居进行采样。每一层的采样数量都是固定的(第 层的采样数量为 )。 如果邻居样本数量不够,那么直接以所有邻居节点作为样本即可 (通过下文的聚合方式可以看出,如果使用重复采样的话的出来的结果几乎一样)。
对比 deep walk,graphsage 整个算法复杂度大大减小,其优化就在于这边的随机采样的方式。
优化对象
对于无监督学习,可以采用:
这样做的直觉是拉近邻居节点的表示,拉开非邻居节点之间的表示。Q 为负采样样本的数量,
对于有标签的监督学习,可以采用交叉熵,根据中新节点进行分类学习。
聚合 Aggregate
文中提出了以下聚合方式:
Mean aggregator
GraphSAGE-mean 将算法 1 伪代码中的 4 行替换为了以下操作:
伪代码第 5 行的拼接操作可以看做是一次残差连接,使得模型有更好的学习能力。
论文在实验过程中对比了 根据 GCN 推导的 inductive variant 版本(GraphSAGE-GCN),即将算法一伪代码 4-5 行替换为:
但从实验结果看来,缺少了残差链接的 GraphSAGE-GCN 总体上效果不如 GraphSAGE-mean
Pooling aggregator
Mean Aggregator 不同的是,Pooling aggregator 使用了可学习的参数。作者发现 mean pooling 和 max pooling 的实验结果并没有太大差异。
LSTM aggregator
LSTM 会由于输入的顺序变化而产生不同输出,这与图网络的性质不符合。对于一个节点来说,他的邻居节点的顺序是并不能为他本身提供有价值的信息。
因此,论文作者在进行节点输入之前,对邻居进行了随机排序,来尽可能减小由于顺序带来的影响。
实验与结果
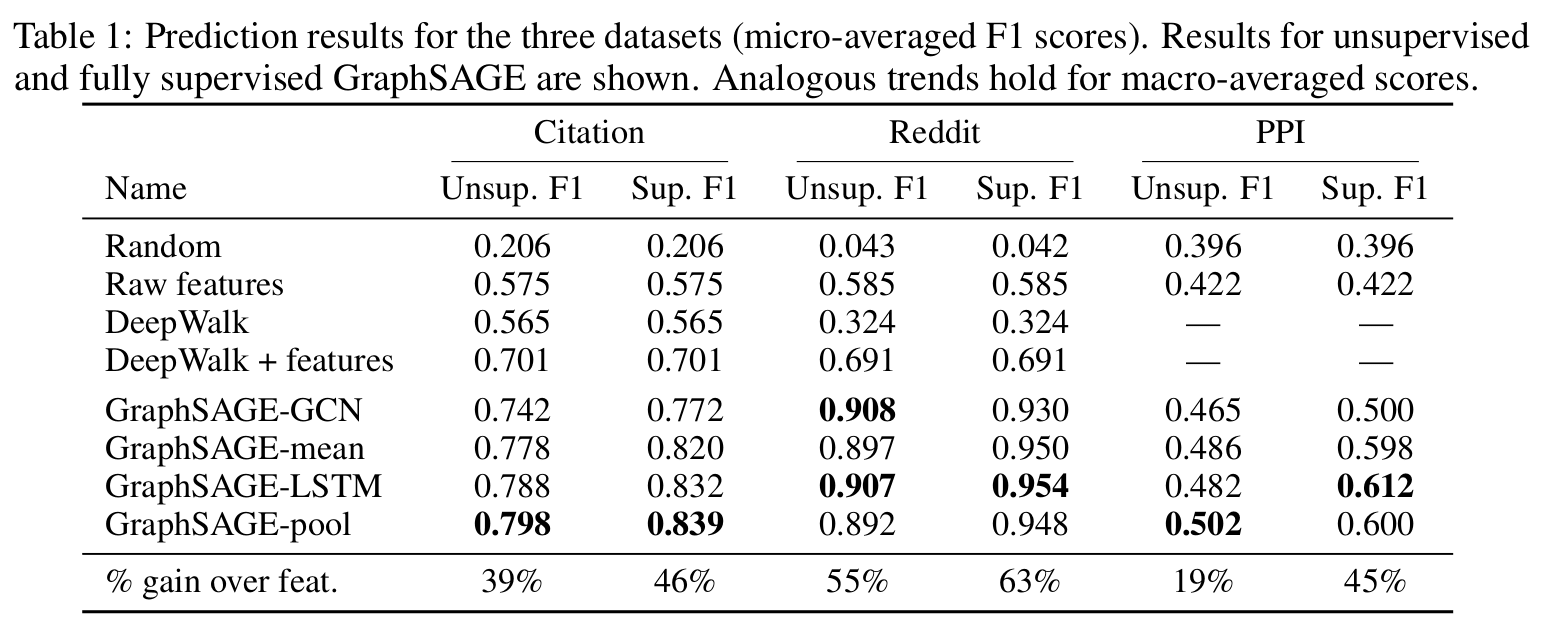
从三个数据集的 Micro-averaged F1 可以看出, GraphSage-pool 与 GraphSAGE-LSTM 的效果更好一些。
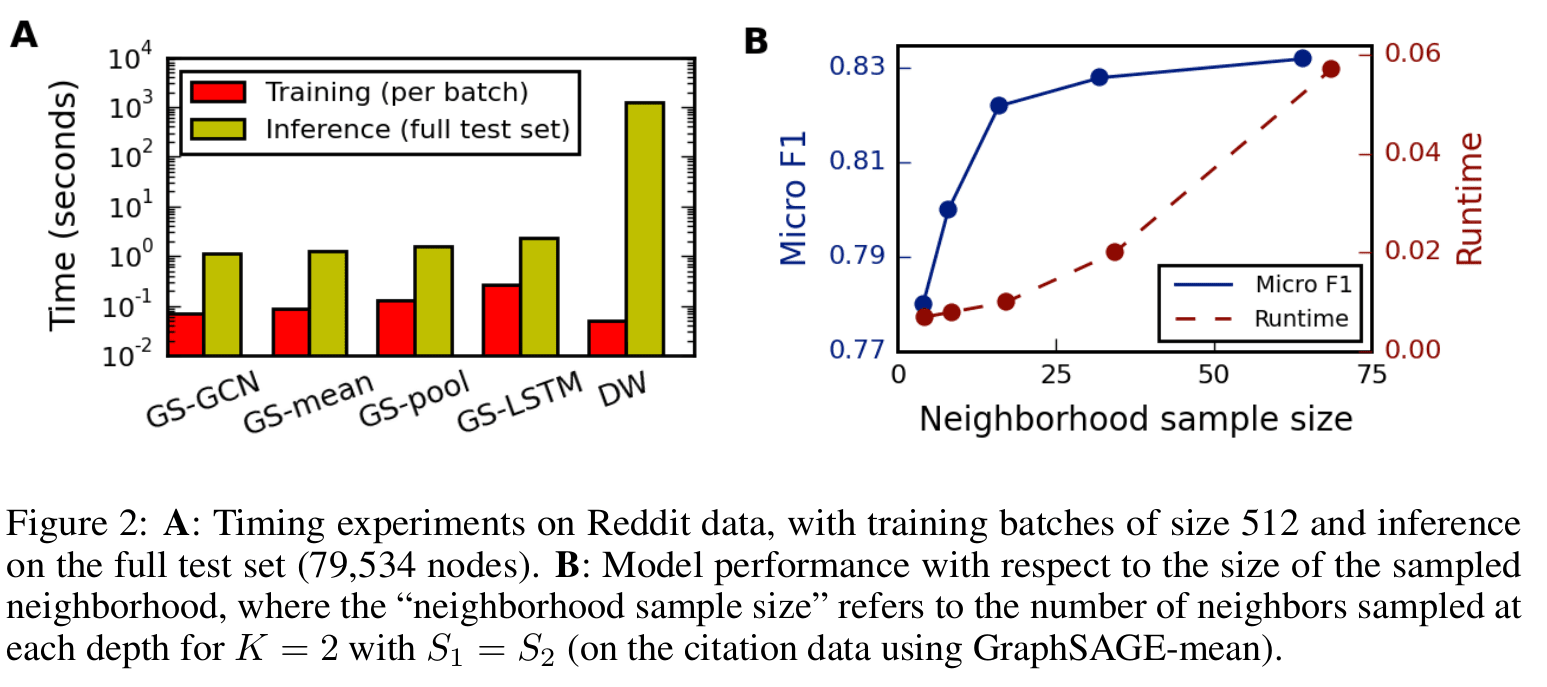
对于训练效率,GraphSAGE 之间的差距并不大,但是他们均比 DeepWalk 快了 2 个数量级。
部分代码细节
首先是 aggregator 的前向传导 pytorch 代码:
def forward(self, nodes, to_neighs, num_sample=10):
"""
nodes --- list of nodes in a batch
to_neighs[len()=len(nodes)] --- list of sets, each set is the set of neighbors for node in batch
num_sample --- number of neighbors to sample. No sampling if None.
"""
# Local pointers to functions (speed hack)
_set = set
if not num_sample is None:
_sample = random.sample
samp_neighs = [_set(_sample(to_neigh,
num_sample,
)) if len(to_neigh) >= num_sample else to_neigh for to_neigh in to_neighs]
else:
samp_neighs = to_neighs
if self.gcn:
samp_neighs = [samp_neigh + set([nodes[i]]) for i, samp_neigh in enumerate(samp_neighs)]
unique_nodes_list = list(set.union(*samp_neighs))
unique_nodes = {n:i for i,n in enumerate(unique_nodes_list)}
mask = Variable(torch.zeros(len(samp_neighs), len(unique_nodes)))
column_indices = [unique_nodes[n] for samp_neigh in samp_neighs for n in samp_neigh]
row_indices = [i for i in range(len(samp_neighs)) for j in range(len(samp_neighs[i]))]
mask[row_indices, column_indices] = 1
# mask[batch_size, num_unique_sample]
if self.cuda:
mask = mask.cuda()
num_neigh = mask.sum(1, keepdim=True)
mask = mask.div(num_neigh) # 得到每个 batch 的权重。
if self.cuda:
# 此处 features 为 nn.Embedding()
embed_matrix = self.features(torch.LongTensor(unique_nodes_list).cuda())
else:
embed_matrix = self.features(torch.LongTensor(unique_nodes_list))
to_feats = mask.mm(embed_matrix)
return to_feats
算法 1 伪代码中的第 5 行对应的就是下面 encoder 部分的前向推导代码:
def forward(self, nodes):
"""
Generates embeddings for a batch of nodes.
nodes -- list of nodes
"""
neigh_feats = self.aggregator.forward(nodes, [self.adj_lists[int(node)] for node in nodes], self.num_sample)
if not self.gcn:
# 论文中有提出,如果使用类似 GCN 的 inductive 方式,不会有拼接操作。
if self.cuda:
self_feats = self.features(torch.LongTensor(nodes).cuda())
else:
self_feats = self.features(torch.LongTensor(nodes))
combined = torch.cat([self_feats, neigh_feats], dim=1)
else:
combined = neigh_feats
combined = F.relu(self.weight.mm(combined.t()))
return combined
于是整个网络的可以定义成:
class SupervisedGraphSage(nn.Module):
def __init__(self, num_classes, enc):
super(SupervisedGraphSage, self).__init__()
self.enc = enc
self.xent = nn.CrossEntropyLoss()
self.weight = nn.Parameter(torch.FloatTensor(num_classes, enc.embed_dim))
init.xavier_uniform(self.weight)
def forward(self, nodes):
embeds = self.enc(nodes)
scores = self.weight.mm(embeds)
return scores.t()
def loss(self, nodes, labels):
scores = self.forward(nodes)
return self.xent(scores, labels.squeeze())
因为 K=2,所以在创建类实例的时候可以采用以下方式:
num_nodes = 2708
feat_data, labels, adj_lists = load_cora()
features = nn.Embedding(2708, 1433)
features.weight = nn.Parameter(torch.FloatTensor(feat_data), requires_grad=False)
# features.cuda()
agg1 = MeanAggregator(features, cuda=True)
enc1 = Encoder(features, 1433, 128, adj_lists, agg1, gcn=True, cuda=False)
# 在对二阶邻居计算完成后,使用对应节点的新特征进行计算。
# 这边新的 features 包含了原节点 features 与其二阶邻居聚合后的信息
agg2 = MeanAggregator(lambda nodes : enc1(nodes).t(), cuda=False)
enc2 = Encoder(lambda nodes : enc1(nodes).t(), enc1.embed_dim, 128, adj_lists, agg2,
base_model=enc1, gcn=True, cuda=False)
enc1.num_samples = 5
enc2.num_samples = 5
graphsage = SupervisedGraphSage(7, enc2)
参考
- Monet:Federico Monti, Davide Boscaini, Jonathan Masci, Emanuele Rodolà, Jan Svoboda, and Michael MBronstein. Geometric deep learning on graphs and manifolds using mixture model cnns. arXiv preprint arXiv:1611.08402, 2016.
- Gong, L., & Cheng, Q. (2019). Exploiting edge features for graph neural networks. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (pp. 9211-9219).
- Hamilton, W. L., Ying, R., & Leskovec, J. (2017, December). Inductive representation learning on large graphs. In Proceedings of the 31st International Conference on Neural Information Processing Systems (pp. 1025-1035).