DIFFUSION 系列笔记| SDE(上)
论文 SCORE-BASED GENERATIVE MODELING THROUGH STOCHASTIC DIFFERENTIAL EQUATIONS
从 stochastic differential equations 的角度,尝试提出了一个统一的模型框架,来概括 DDPM,SMLD 等 score-based generative models。
该论文的作者 宋飏 在他的博客中也详细地介绍了该模型的理论,并且提供了基于 torch 的 Colab 教程。本文主要基于宋飏的博客,对该论文提出的模型思路进行了重新整理。
相关信息
宋飏大佬的博客从 Score based Model 和 Langivan Dynamic 等理论入手,逐步介绍到了 Diffusion SDE 模型。不同于宋飏博士的原博客,本文主要先记录了 SDE 模型。在了解 SDE 的操作流程后,再继续深入,记录其中的 Langivan Dynamic,score-function 等相关原理。
1. 理论 - 扩散模型和 SDE 的结合
相关信息
在 DDIM 中,其作者对 DDPM 的采样及前项传播公式进行了修改。从而实现了采样的确定性以及速度提升。而在 SDE 中,其作者将扩散模型的前向与反向过程与 [stochastic process](https://en.wikipedia.org/wiki/Stochastic_process#:~:text=A stochastic or random process can be defined as a,an element in the set.) 巧妙地建立了联系。这使得我们能够从物理学地角度出发,用该领域地理论去验证、推理和改进扩散过程。
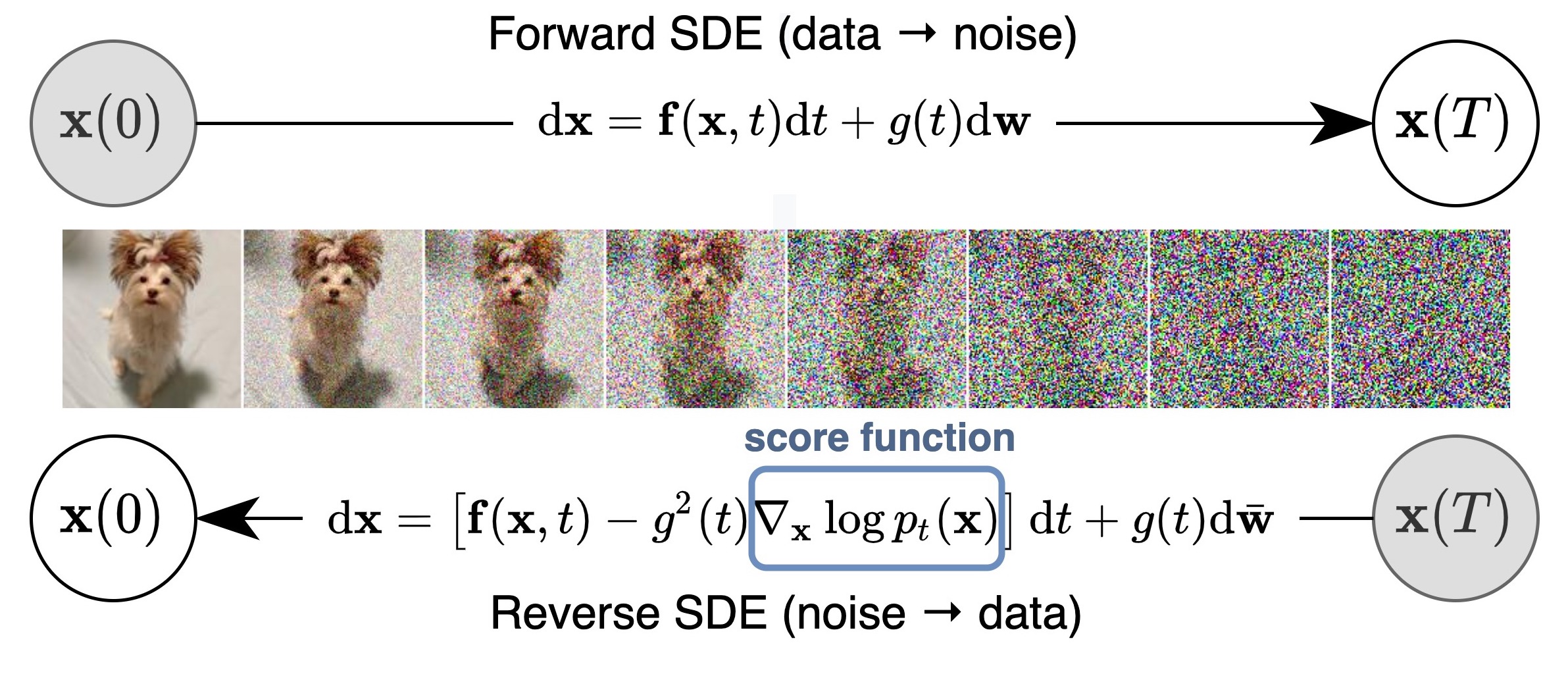
1.1 Forward Process
我们可以把 diffusion 的前向过程看作 stochastic process (类似布朗运动的随机过程),这里的 diffusion 过程指我们将一张完整图片,一步一步加噪,直至变成完全噪音图片的过程,对这个概念陌生的朋友可以参考 扩散模型探索:DDPM 笔记与思考。
我们定义 为一个 diffusion 前向过程,那么在这个扩散过程中, 之间的关系可以通过 stochastic differential equation (SDE) 表示为:
其中 代表时间步, 为 standard Wiener process(也称 Brownian motion,可以看作是随机项), 和 分别为 drift coefficient 和 diffusion coefficient 。在 DDIM 中,我们发现 diffusion 的前向过程可以看作 ODE。SDE 与 ODE 的主要差别在于 SDE 在传播过程中,添加了随即项 。
如果用 表示 的分布,通过上面的 diffusion 前向过程,我们能够将一整图片 转变成完全的噪声 。此处 也称为 prior distribution,它是一个可以轻松采样得到的分布。
1.2 Backward Process
一个有趣的事情是,对于公式 的 SDE 过程,我们能够通过数学方式推导出他的逆向过程,即 reverse SDE。reverse SDE 是其他领域的研究成果,并非为扩散模型而生,其推导过程相对复杂,可以参考网友推导 或者 Maruyama_method。我们可以将采用 reverse SDE 作为 diffusion 的反向过程,具体公式为:
其中 为反向过程中的 Brownian motion。参考以上公式,我们只需要知道 drift coefficient ,diffusion coefficient 以及 score function 就可以进行反向过程了。
对于 reverse SDE,我们可以训练一个模型 来拟合 score function,训练时候的优化目标来源于 Denoising Score Matching:
这与其中 为正的权重系数。
参考文章 A Connection Between Score Matching and Denoising Autoencoders :
其中 为 的方差,将 式带入到 式的优化项中得到:
其中 , 。此处,作者令 是为了使得 loss 在不同的时间步 下保持平衡。
2. 实践 - 定义 SDE 前向推导
注意!以下前项推导过程基于特定 假设 ,目的是为了简化 SDE 流程,以便学习和理解。 官方的 SDE 系列模型前项推导过程与下文介绍的大同小异,我们会在下一章节讨论到。
假设我们的前向过程为:
在 SDE 原文及源码中,上述公式中可能记为 。为避免读者将其中的 和方差 混淆,因此在本文中我们将其标记为 。
参考上文的公式 ,很明显公式 令 drift coefficient 为 0,在这个情况下
当 足够大时,先验分布 为:
这个先验分布就是 的分布,在生成图片的过程中,我们需要通过该分布,采样出来 ,而后通过反向过程来生成我们想要的图片 。
因此根据公式 ,loss 的计算过程可以写成:
import paddle
import functools
# Modified from https://colab.research.google.com/drive/120kYYBOVa1i0TD85RjlEkFjaWDxSFUx3?usp=sharing#scrollTo=zOsoqPdXHuL5
def loss_fn(model, x, marginal_prob_std, eps=1e-5):
"""Compute the loss function. 参考公式 (5)
Args:
model: A score model.
batch: A mini-batch of training data.
Returns:
loss: A scalar that represents the average loss value across the mini-batch.
"""
# 此处的 score funciton 可以看做是一个 Unet + post processing
random_t = paddle.rand((x.shape[0],)) * (1. - eps) + eps
z = paddle.randn(x.shape)
std = marginal_prob_std(random_t)
perturbed_x = x + z * std[:, None, None, None]
score = model(perturbed_x, random_t)
# 如公式 5 得出 loss 的计算结果。
loss = paddle.mean(paddle.sum((score * std[:, None, None, None] + z)**2, axis=(1,2,3)))
return loss
其中 marginal_prob_std 表示 中的方差; diffusion_coeff 表示公式 中的 diffusion coefficient
# modified from https://colab.research.google.com/drive/120kYYBOVa1i0TD85RjlEkFjaWDxSFUx3?usp=sharing#scrollTo=LZC7wrOvxLdL
def marginal_prob_std(t, beta):
# 参考公式 7
return paddle.sqrt((beta**(2 * t) - 1.) / 2. / paddle.log(beta))
def diffusion_coeff(t, beta):
# 参考公式 6 与公式 1
return beta**t
beta = paddle.to_tensor(25.) # 该参数对应 ppdiffusors sde 中的 sigma
marginal_prob_std_fn = functools.partial(marginal_prob_std, beta=beta)
diffusion_coeff_fn = functools.partial(diffusion_coeff, beta=beta)
其中 Diffusion SDE 作者令 是为了使得 loss 在不同的时间步 下保持平衡。
在确定好 loss function 之后,我们定义一个模型 ScoreNet (即前面公式中提到的 )来对 score function 进行拟合。模型架构我们参考宋飏大佬在 Tutorial on Score-Based Generative Modeling 教程中的模型进行设计,具体模型架构可在 model.py 中查看。
对于模型架构,一个有意思的点是,论文中实用了 U-Net,并针对 U-Net 的结果除以 进行了归一化,原作者表示:
model output rescale by ), this rescaling helps capture the norm of the true score。
笔者理解大概意思可能为:由于我们实用 拟合 ,其中 的方差为 。因此优化后的 也会有同样的方差为 ,在 U-Net 输出处除以 能够使模型的输出方差保持在 1?从而使得模型训练更佳稳定?
3. 实践 - 模型训练
在确定好 loss 之后,可以使用 U-Net 进行训练,拟合 score function。 我们使用 MNIST 手写数字图片进行实现:
from paddle.vision.datasets import MNIST
from paddle.io import DataLoader
from paddle.vision.transforms import Compose, Normalize
batch_size = 128
transform = Compose([Normalize(mean=[0],std=[255])])
dataset = MNIST(mode='train', backend='cv2',transform=transform)
loader = DataLoader(dataset,
batch_size=batch_size,
shuffle=True,
num_workers=2)
Score Net 详细
import paddle.nn as nn
import paddle.nn.functional as F
import numpy as np
import paddle
# modified from https://colab.research.google.com/drive/120kYYBOVa1i0TD85RjlEkFjaWDxSFUx3?usp=sharing#scrollTo=LZC7wrOvxLdL
class GaussianFourierProjection(nn.Layer):
"""Gaussian random features for encoding time steps."""
def __init__(self, embed_dim, scale=30.):
super().__init__()
# Randomly sample weights during initialization. These weights are fixed
# during optimization and are not trainable.
self.register_buffer("W", paddle.randn((embed_dim // 2,)) * scale)
def forward(self, x):
x_proj = x[:, None] * self.W[None, :] * 2 * np.pi
return paddle.concat([paddle.sin(x_proj), paddle.cos(x_proj)], axis=-1)
class Dense(nn.Layer):
"""A fully connected layer that reshapes outputs to feature maps."""
def __init__(self, input_dim, output_dim):
super().__init__()
self.dense = nn.Linear(input_dim, output_dim)
def forward(self, x):
return self.dense(x)[..., None, None]
class ScoreNet(nn.Layer):
"""A time-dependent score-based model built upon U-Net architecture."""
def __init__(self, marginal_prob_std, channels=[32, 64, 128, 256], embed_dim=256):
"""Initialize a time-dependent score-based network.
Args:
marginal_prob_std: A function that takes time t and gives the standard
deviation of the perturbation kernel p_{0t}(x(t) | x(0)).
channels: The number of channels for feature maps of each resolution.
embed_dim: The dimensionality of Gaussian random feature embeddings.
"""
super().__init__()
# Gaussian random feature embedding layer for time
self.embed = nn.Sequential(GaussianFourierProjection(embed_dim=embed_dim),
nn.Linear(embed_dim, embed_dim))
# Encoding layers where the resolution decreases
self.conv1 = nn.Conv2D(1, channels[0], 3, stride=1, bias_attr=False)
self.dense1 = Dense(embed_dim, channels[0])
self.gnorm1 = nn.GroupNorm(4, num_channels=channels[0])
self.conv2 = nn.Conv2D(channels[0], channels[1], 3, stride=2, bias_attr=False)
self.dense2 = Dense(embed_dim, channels[1])
self.gnorm2 = nn.GroupNorm(32, num_channels=channels[1])
self.conv3 = nn.Conv2D(channels[1], channels[2], 3, stride=2, bias_attr=False)
self.dense3 = Dense(embed_dim, channels[2])
self.gnorm3 = nn.GroupNorm(32, num_channels=channels[2])
self.conv4 = nn.Conv2D(channels[2], channels[3], 3, stride=2, bias_attr=False)
self.dense4 = Dense(embed_dim, channels[3])
self.gnorm4 = nn.GroupNorm(32, num_channels=channels[3])
# Decoding layers where the resolution increases
self.tconv4 = nn.Conv2DTranspose(channels[3], channels[2], 3, stride=2, bias_attr=False)
self.dense5 = Dense(embed_dim, channels[2])
self.tgnorm4 = nn.GroupNorm(32, num_channels=channels[2])
self.tconv3 = nn.Conv2DTranspose(channels[2] + channels[2], channels[1], 3, stride=2, bias_attr=False, output_padding=1)
self.dense6 = Dense(embed_dim, channels[1])
self.tgnorm3 = nn.GroupNorm(32, num_channels=channels[1])
self.tconv2 = nn.Conv2DTranspose(channels[1] + channels[1], channels[0], 3, stride=2, bias_attr=False, output_padding=1)
self.dense7 = Dense(embed_dim, channels[0])
self.tgnorm2 = nn.GroupNorm(32, num_channels=channels[0])
self.tconv1 = nn.Conv2DTranspose(channels[0] + channels[0], 1, 3, stride=1)
# The swish activation function
self.act = lambda x: x * F.sigmoid(x)
self.marginal_prob_std = marginal_prob_std
def forward(self, x, t):
# Obtain the Gaussian random feature embedding for t
embed = self.act(self.embed(t))
# Encoding path
h1 = self.conv1(x)
## Incorporate information from t
h1 += self.dense1(embed)
## Group normalization
h1 = self.gnorm1(h1)
h1 = self.act(h1)
h2 = self.conv2(h1)
h2 += self.dense2(embed)
h2 = self.gnorm2(h2)
h2 = self.act(h2)
h3 = self.conv3(h2)
h3 += self.dense3(embed)
h3 = self.gnorm3(h3)
h3 = self.act(h3)
h4 = self.conv4(h3)
h4 += self.dense4(embed)
h4 = self.gnorm4(h4)
h4 = self.act(h4)
# Decoding path
h = self.tconv4(h4)
## Skip connection from the encoding path
h += self.dense5(embed)
h = self.tgnorm4(h)
h = self.act(h)
h = self.tconv3(paddle.concat([h, h3], axis=1))
h += self.dense6(embed)
h = self.tgnorm3(h)
h = self.act(h)
h = self.tconv2(paddle.concat([h, h2], axis=1))
h += self.dense7(embed)
h = self.tgnorm2(h)
h = self.act(h)
h = self.tconv1(paddle.concat([h, h1], axis=1))
# Normalize output
h = h / self.marginal_prob_std(t)[:, None, None, None]
return h
相关信息
在训练过程中,我们对公式 定义的 loss 进行优化,执行以下代码,训练结束后,大致的 LOSS 会在 17 左右。
如果执行时,出现 tqdm.notebook 不存在等错误,可尝试升级 tqdm 版本。
若问题仍无法解决,请尝试移除 processor 相关代码后再执行。
模型训练:
# modified from https://colab.research.google.com/drive/120kYYBOVa1i0TD85RjlEkFjaWDxSFUx3?usp=sharing#scrollTo=LZC7wrOvxLdL
from paddle import nn
n_epochs = 50
learning_rate = 1e-4
model = ScoreNet(marginal_prob_std_fn)
optimizer = paddle.optimizer.AdamW(learning_rate=learning_rate,
parameters=model.parameters())
try:
from tqdm.notebook import trange
processor = trange(n_epochs * len(loader))
except:
raise RuntimeError("Please upgrade tqdm to enable progress bar.")
for epoch in range(n_epochs):
avg_loss = 0.
num_items = 0.
for x, y in loader:
optimizer.clear_grad()
loss = loss_fn(model, x, marginal_prob_std_fn)
loss.backward()
optimizer.step()
avg_loss += loss.item() * x.shape[0]
num_items += x.shape[0]
# tqdm 有问题时,移除下面两行代码
processor.update()
processor.set_description(f"Current Loss: {avg_loss / num_items:5f}")
layer_state_dict = model.state_dict()
paddle.save(layer_state_dict, f"model.pdparams")
4. 实践 - 反向过程及采样
4.1 Sampling with Numerical SDE Solvers
由于我们在前项传导(公式 )中,假定了:
并且有 。根据公式 ,可以得到反向过程为:
有了反向过程,我们还需要一个初始值 进行采样。我们可以从公式 的分布 中采样出 ;
很关键的一步,我们可以通过数学推导的方式来求得具体的反向过程。比如可以参考 Euler-Maruyama 方案,该方案将 替换为 , 替换为 来实现对公式 的离散化。于是,具体的采样过程就是:
我们可以将以上过程通过代码实现:
# modified from https://colab.research.google.com/drive/120kYYBOVa1i0TD85RjlEkFjaWDxSFUx3?usp=sharing#scrollTo=LZC7wrOvxLdL
import tqdm
from PIL import Image
model = ScoreNet(marginal_prob_std_fn)
load_layer_state_dict = paddle.load("model.pdparams")
model.set_state_dict(load_layer_state_dict)
num_steps = 500
def Euler_Maruyama_sampler(score_model,
marginal_prob_std,
diffusion_coeff,
batch_size=32,
num_steps=num_steps,
eps=1e-3):
"""Generate samples from score-based models with the Euler-Maruyama solver.
Args:
score_model: s_\theta(x,t)
marginal_prob_std: A function that gives the standard deviation of
the perturbation kernel.
diffusion_coeff: The \beta. A function that gives the diffusion coefficient of the SDE.
eps: The smallest time step for numerical stability.
Returns:
Samples.
"""
t = paddle.ones((batch_size,))
# 采样 x_0
init_x = paddle.randn((batch_size, 1, 28,28)) \
* marginal_prob_std(t)[:, None, None, None]
# eps 试试调整以下 eps,看下生成的图片有什么变化
time_steps = paddle.linspace(1., eps, num_steps)
step_size = time_steps[0] - time_steps[1]
x = init_x
try:
tqdm_processor = tqdm.notebook.tqdm
except:
tqdm_processor = tqdm.tqdm
with paddle.no_grad():
for time_step in tqdm_processor(time_steps):
batch_time_step = paddle.ones((batch_size,)) * time_step
g = diffusion_coeff(batch_time_step)
mean_x = x + (g**2)[:, None, None, None] * score_model(x, batch_time_step) * step_size
x = mean_x + paddle.sqrt(step_size) * g[:, None, None, None] * paddle.randn(x.shape)
# 在最后一步中,我们不添加任何噪声
return mean_x
def display_images(sample_img):
if len(sample_img.shape) == 3:
sample_img = sample_img[None,:,:,:]
# sample_img = sample_img.squeeze(1)
images = sample_img.clip(0,1).transpose([0,2,3,1]).numpy()
images = images[:,:,:,0]
images = (images * 255).round().astype("uint8")
pil_images = [Image.fromarray(image) for image in images]
for image in pil_images:
image.show()
sample_img = Euler_Maruyama_sampler(model,
marginal_prob_std_fn,
diffusion_coeff_fn,
batch_size=4,
num_steps=num_steps,
eps=1e-3)
display_images(sample_img)

5. 小结 - SDE 基础概念
至此,我们了解了 Diffusion SDE 的大致流程,包括 diffusion 的 forward 和 backward 两个过程。以及如何通过 score match 的优化目标来训练 score function。
- 我们将 diffusion 与 SDE 建立了联系,并使用 SDE 作为 diffusion 前项过程。
- 我们通过 score matching 确定了 loss function,并使用 UNet 拟合了 score funciton,即
- 根据这个 SDE 前项过程,我们通过数学推导的方式 ( Euler-Maruyama),确定了反向推导的流程。并使用训练好的 UNet 进行了采样,采样的结果如上所示,能明显看出采样生成的手写数字,效果是很不错的。
6. 理论 - Score-based generative models
我们在上文中,大致介绍了 Diffusion SDE 模型的 pipeline。在下文中,我们来欣赏 Diffusion SDE 背后的思想。我们需要了解 score function,Langevin Dynamics 和 MCMC。
6.1 Score Function
搭建一个生成模型时,通常会考虑得到他的概率分布 ,如果我们选择模型作为该生成模型的概率分布:
其中 为配分参数,用于标准化 。而 通常称为能量分布(energy-based model)(似乎上面这种分布再物理中很常见)。为了求得 ,通常我们会最大化他的对数似然函数
然后得到 之后进行采样。但 中存在难以计算的 ,为避免 ,我们可以考虑对 score function 下手,一个分布 的 score function 定义为 the gradient of log-density,即:
如果我们求得 score function:
那么,我们就可以使用 Langevin dynamics 来进行采样。
6.2 Langevin Dynamics 和 MCMC
Metropolis-adjusted Langevin algorithm (MALA) 或 Langevin Monte Carlo (LMC) 是一种通过 MCMC 来从难以直接计算的分布中采样的方法。MCMC 为 Markov Chain Monte Carlo,采样的过程可以视为不同 state 之间的随机游走转换,其中初始化值从 中采样,采样的过程可表示为以下公式:
当 时,通过上述分布采样出来的 会服从于 ,或者可以说,上式会收敛于 。因此,我们只需要对图像分布 的 score function 进行公式 的迭代,那么我们相当于从图像分布 进行采样。Langevin Dynamics 和 MCMC 更多参考:网友博客 - MCMC
6.3 Score Matching
以上介绍了求得 score funciton 之后,我们能够通过 Langevin dynamic 进行采样。
以下为求解 score funciton 的方法做简单介绍。为了求得 score function,我们可以优化 Fisher Divergence:
可以通过 [Score Matching](Estimation of Non-Normalized Statistical Models by Score Matching) 的方式优化上面这个式子。关于 score matching,这部分较为复杂,如果对其背后原理感兴趣的读者,可以参考:
- Estimation of non-normalized statistical models by score matching
- A connection between score matching and denoising autoencoders
- Sliced score matching: A scalable approach to density and score estimation
6.4 Sampling with Predictor-Corrector Methods
参考以上结论,所以我们不需要知道 便能对 score function 进行优化了,求得 ,这个模型也可以称为 score-based model。假设我们采样得到了 ,那么我们可以通过 Langevin Dynamics 和 MCMC (公式 )来进行采样。
Predictor-Corrector samplers 结合了 numerical SDE solvers (参考上一章节中我们使用的采样器)和 Langevin MCMC。
- 对于 predictor step:我们使用 numerical SDE solvers 来根据 采样 。
- 对于 corrector step:我们使用 Langevin MCMC 来修正 ,这样我们的预测 会更准确。
# Modified from https://colab.research.google.com/drive/120kYYBOVa1i0TD85RjlEkFjaWDxSFUx3?usp=sharing#scrollTo=zOsoqPdXHuL5
import numpy as np
signal_to_noise_ratio = 0.2
num_steps = 500
def pc_sampler(score_model,
marginal_prob_std,
diffusion_coeff,
batch_size=64,
num_steps=num_steps,
snr=signal_to_noise_ratio,
eps=1e-3):
"""Generate samples from score-based models with Predictor-Corrector method.
Args:
score_model: A PyTorch model that represents the time-dependent score-based model.
marginal_prob_std: A function that gives the standard deviation
of the perturbation kernel.
diffusion_coeff: A function that gives the diffusion coefficient
of the SDE.
batch_size: The number of samplers to generate by calling this function once.
num_steps: The number of sampling steps.
Equivalent to the number of discretized time steps.
device: 'cuda' for running on GPUs, and 'cpu' for running on CPUs.
eps: The smallest time step for numerical stability.
Returns:
Samples.
"""
t = paddle.ones((batch_size,))
init_x = paddle.randn((batch_size, 1, 28, 28)) * marginal_prob_std(t)[:, None, None, None]
time_steps = np.linspace(1., eps, num_steps)
step_size = time_steps[0] - time_steps[1]
x = init_x
try:
tqdm_processor = tqdm.notebook.tqdm
except:
tqdm_processor = tqdm.tqdm
with paddle.no_grad():
for time_step in tqdm_processor(time_steps):
batch_time_step = paddle.ones((batch_size,)) * time_step
# Corrector step (Langevin MCMC)
grad = score_model(x, batch_time_step)
grad_norm = paddle.norm(grad.reshape((grad.shape[0], -1)), axis=-1).mean()
noise_norm = np.sqrt(np.prod(x.shape[1:]))
langevin_step_size = 2 * (snr * noise_norm / grad_norm)**2
x = x + langevin_step_size * grad + paddle.sqrt(2 * langevin_step_size) * paddle.randn(x.shape)
# Predictor step (Euler-Maruyama)
g = diffusion_coeff(batch_time_step)
x_mean = x + (g**2)[:, None, None, None] * score_model(x, batch_time_step) * step_size
x = x_mean + paddle.sqrt(g**2 * step_size)[:, None, None, None] * paddle.randn(x.shape)
# 在最后一步中,我们不添加任何噪声
return x_mean
sample_img = pc_sampler(model,
marginal_prob_std_fn,
diffusion_coeff_fn,
batch_size=4,
num_steps=num_steps,
snr=signal_to_noise_ratio,
eps=1e-3)
display_images(sample_img)

总结
本文基于宋飏大佬的博客及 torch 的 Colab 教程做了笔记整理。初步探讨了论文 SCORE-BASED GENERATIVE MODELING THROUGH STOCHASTIC DIFFERENTIAL EQUATIONS 中 SDE 模型的大致思想。